

灵宝CASBOT与CASIA共同提出“增强物理人机协作中的人类意图估计和人机角色分配”方法
近日,机器人与自动化领域全球顶会ICRA 2025在美国亚特兰大开幕。由中国科学院自动化研究所与灵宝CASBOT共同提出的关于“增强物理人机协作中的人类意图估计和人机角色分配”方法(DTRT: Enhancing Human Intent Estimation and Role Allocation for Physical Human-Robot Collaboration)获ICRA 2025录用。
01. DTRT:增强物理人机协作中的人类意图估计和人机角色分配
在物理人机协作(physical Human-Robot Collaboration, pHRC)中,准确的人类意图估计和合理的人机角色分配对安全高效的协作至关重要。现有的依赖短期运动数据进行意图估计的方法缺乏多步预测能力,阻碍了机器人感知长期意图变化和自主调整人机分配的能力,从而导致潜在的人机分歧。为了解决这些问题,中国科学院自动化研究所与灵宝CASBOT共同提出了一种基于对偶Transformer的人机协作框架(Dual Transformer-based Robot Trajectron, DTRT),该框架采用分层结构,利用人类引导的运动和力数据来快速捕获人类意图变化,从而实现准确的轨迹预测和动态机器人行为调整,最终实现有效的物理人机协作。
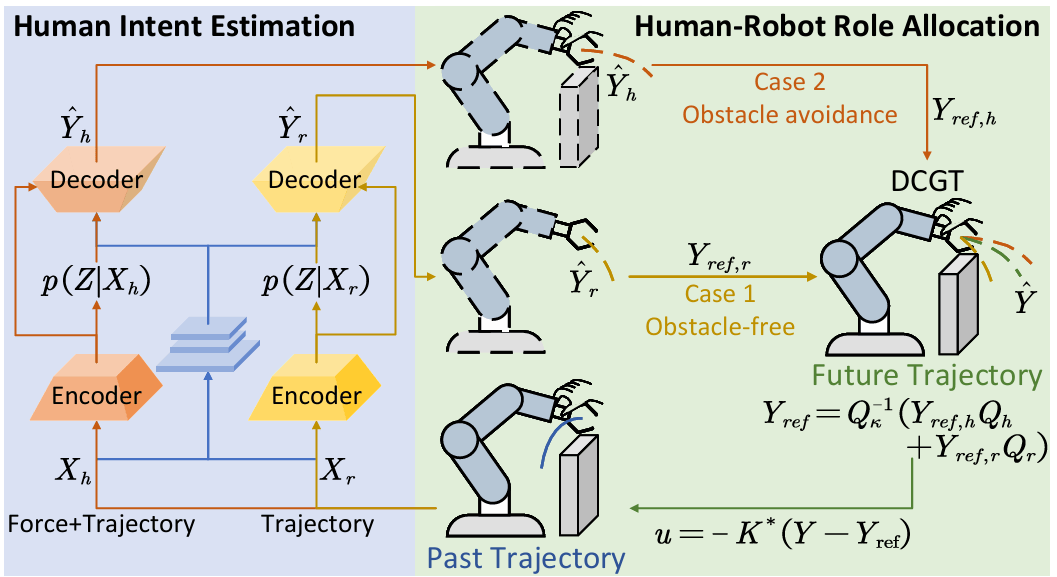
基于双变压器的机器人轨迹器,用于人类意图估计和角色分配
具体而言,DTRT中的人类意图估计利用两个基于Transformer的条件变分自编码器(Conditional Variational Autoencoder, CVAE),将机器人在无障碍物情况下的运动数据与避障时人类引导的轨迹和力相结合。此外,我们采用基于人类施加力的微分合作博弈论(Differential Cooperative Game Theory, DCGT)来综合两种预测,确保机器人的行为与人类的意图一致。与现有方法相比,DTRT将人类动态纳入长期预测,提供准确的意图理解,实现合理的角色分配,提升机器人的自主性和可操作性。
02. 物理人机协作面临意图预测与角色分配的双重挑战
物理人机协作(pHRC)在制造、医疗保健和服务中至关重要。需要有效的策略来确保机器人能够无缝地与人类协作,进行准确的估计意图,并动态调整行为,从而协助人类。因此,精确的人类意图估计和合理的人机角色分配是提高pHRC性能的关键挑战。
基于人类意图对未来轨迹的准确预测对于机器人辅助的有效性和pHRC的安全性至关重要。在存在潜在危险的复杂环境中,例如当机器人遇到未知障碍物时,人类意图的快速变化给意图估计带来了重大挑战。目前的方法主要依赖于短期运动数据,如位置和速度,这限制了检测人类意图变化,将影响预测的准确性和安全性。
此外,短期数据会降低长期协作中意图估计的有效性。因此,研究将人类施加的力量整合到pHRC中的长期预测方法对于实现准确的意图估计至关重要。此外,人机角色分配涉及一种复杂的机制,用于在人类和机器人之间分配任务控制权。这一过程将实时协调人机关系,减少分歧并提高机器人的辅助水平。现有方法主要依赖阻抗/柔顺性控制,通过修改模型参数来确定角色。在各种方法中,基于博弈论的角色分配模拟多参与者之间的协作过程,将目标设定为最小化成本函数以实现最优的人机协同关系。然而,确保机器人行为与人类意图一致,同时保持自主性和灵活性仍然是一个重大挑战。
03. DTRT在预测精度与协作表现方面展现显著优势
实验结果表明, DTRT在预测精度方面具有显著优势,在多个物理人机协作指标上表现出卓越的性能,有效降低了人机分歧并提高了机器人的辅助水平,具有巨大的应用潜力。DTRT的核心优势在于以下三点:
1. DTRT将人类意图估计与人机角色分配相结合,以检测意图变化并减少人机分歧,有效提高了复杂和危险易发环境中的人机协作性能。
2. DTRT中的基于分层结构的人类意图估计同时处理人机协作中的运动和力数据,提高了人类意图的预测精度,提供了对意图的准确理解。
3. 基于微分合作博弈论的人机角色分配实现了基于人施加的力的自适应领导者切换,确保机器人的行为与人类意图一致,在保持机器人自主性的同时减少分歧。
在物理人机协作性能上,使用了以下指标:
在实验中,我们对障碍物进行替换和随机定位。结果表明,DTRT在物理人机协作场景下优于现有方法。DTRT的平均人机协作角度为76.4°,平均机器人辅助水平指数为1.5,人机系统在61.8%的时间内处于协作状态。此外,人机角色分配有效地平衡了机器人的自主性和人类引导,使得仅有3.5 J的人类机械功。总体而言,DTRT准确估计了人类意图变化,合理分配了领导者和追随者的角色,从而减少了人机分歧,提高了机器人的辅助水平,促进了安全高效的物理人机协作。
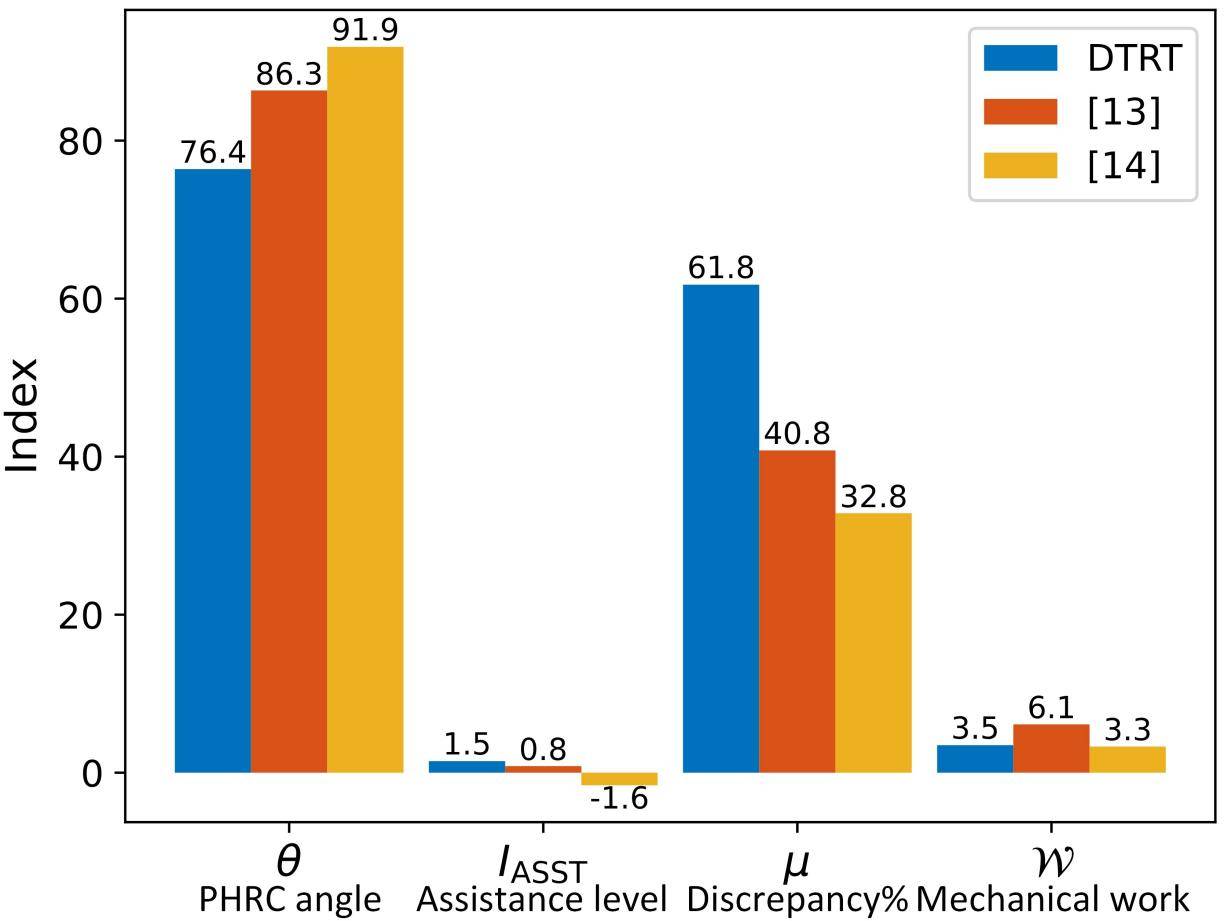
DTRT与现有方法在指标上的定量对比
DTRT的提出,不只是一个算法突破,更是一次“人机关系”重构的尝试:它为人形机器人发展提供了一条兼具通用性与工程价值的技术路径。未来,DTRT的研究思路及其核心机制有望在灵宝CASBOT所聚焦的工业制造、复杂作业、服务协同等多个实际应用场景中持续拓展与深化。
1.本网刊载内容,凡注明来源为“飞象网”和“飞象原创”皆属飞象网版权所有,未经允许禁止转载、摘编及镜像,违者必究。对于经过授权可以转载,请必须保持转载文章、图像、音视频的完整性,并完整标注作者信息和飞象网来源。
2.凡注明“来源:XXXX”的作品,均转载自其它媒体,在于传播更多行业信息,并不代表本网赞同其观点和对其真实性负责。
3.如因作品内容、版权和其它问题,请在相关作品刊发之日起30日内与本网联系,我们将第一时间予以处理。
本站联系电话为86-010-87765777,邮件后缀为cctime.com,冒充本站员工以任何其他联系方式,进行的“内容核实”、“商务联系”等行为,均不能代表本站。本站拥有对此声明的最终解释权。
5G-A赋能机器人火炬接力:中国移动以技术革新点亮全运科技盛宴
2025年11月,第十五届全国运动会将在粤港澳三地盛大启幕。这场赛事不仅是体育健儿的竞技场,更是前沿科技落地应用的“试验田”。其中,11月2日的机器人火炬接力作为本次全运会的核心创新亮点..[详细]
轻薄机型出师未捷身先死,长使业绩泪满襟
当iPhone Air宣布上市当天,随着各路评测内容解禁,一个显眼的标题也随之出现,那就是“注定停产”。轻薄机型的出现一方面让人们看到厂商正在挖掘全新市场空间,另一方面也勾起了小尺寸机型..[详细]
智能未来:宇宙为你闪烁
未来十年,你家的电表可能再也不用换电池,自动驾驶汽车能"看到"几公里外的路况,甚至海洋深处的传感器都能实时传回数据。这些不是科幻,而是刚刚在无锡物博会上发布的《2025全球..[详细]
智能IP广域网成为筑牢智算产业发展根基的关键一环
随着国家加速推动智算产业高质量发展,网络支撑能力已成为产业进阶的核心抓手,而作为关键基础设施的智能IP广域网,正凭借其在算力调度、数据传输中的核心作用,成为筑牢智算产业发展根基的..[详细]
大中华区市场失守 苹果寄望AI驱动未来增长
苹果公司公布的2025 财年第四季度财报呈现“冰火两重天”态势:全球营收1024.66亿美元同比增长 8%,净利润274.66亿美元同比激增86.4%,毛利率攀升至 47.18%。但作为第三大市场的大中华区却成..[详细]









