
�����˹����ܼ����ķ��ٷ�չ���Զ���ʻ��������Ϊ��ʵ���Զ���ʻ�����ĺ�������ʹ���Ƚ����˹������㷨����ʵ�ֶԳ������ⲿ����֮���ϵ���������⣬ȷԤ����仯�����ݴ˹滮�Ϳ��Ƴ�����Ϊ��Ȼ������һ�����ĸ�����Ҳ������һϵ����ս���������������Զ���ʻϵͳ���ܺ�Ѱ�ҸĽ��������档��ȫϢ��NASDAQ: HOLO������Ϊ�Զ���ʻ�㷨�о��������ߣ���������һ�ִ��µ��Զ���ʻ�Ӿ�������������ΪAHIVE���� (Autonomous Driving Holistic Integrated Visual Evaluation�����÷���ȫ�濼�����Զ���ʻȫ����������������������ݣ�������֪������滮·�ߡ��ϰ���Ԥ�⡢���ֿ��Ʋ����Լ����ʶ������ȶ��ά�ȡ�
AHIVE������һ�ִ��µ�����������רΪ�Զ���ʻϵͳ�����ܷ�������ơ���������˶������ݷ����Ϳ��ӻ����������ṩһ��ȫ�桢ϸ�µ����������ӽǡ���������Զ���ʻϵͳ�����й����в������������ݵ��ռ���������������ڳ����ĸ�֪���ݡ���ʻ������Ϣ��·���滮���ߡ��ϰ���Ԥ�⡢������������Լ��������ʶȵķ�����ͨ������һ�����ɷ�����ܣ�AHIVE�ܹ����ռ��������ݽ������ϣ���Ӧ���Ƚ����㷨��������Щ���ݡ����У�������ܰ������ģ�飬ÿ��ģ����Բ�ͬ���������ͺ�����ָ������Ż��������û�ͨ��ͼ�ν���ֱ�۵ز鿴�����⸴�ӵ����ݼ���ͨ����̬ͼ���������ͽ���ʽԪ�أ��û���������ʶ��ϵͳ���ܵ����ƺ�ģʽ��
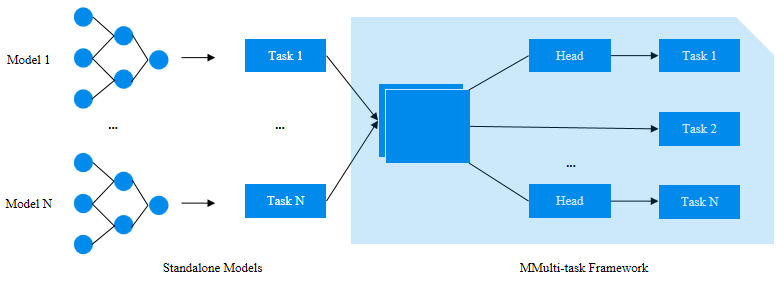
ͨ�����ɾ��пɵ�������������ѧģ�ͣ�AHIVE����֧�ִ���������ˮƽ�������������ϸ����ˮƽ��ϵͳ�����������������ܹ���ʾ������������Ӱ�����أ�����ͨ�����ӻ������������̣��ṩһ��ֱ�ۡ�����ʽ���������顣�����Ŀ��ӻ������������̣������������ĺ��ġ��ù���������ϵͳ��ʼʱ�ṩ��һ�������������������Զ�����ʽ��ʾ��ÿ��ʱ�ڷ����Ķ�̬�仯���û������ڲ�ͬ��ʱ��ν���ʽ��̽���ض�����ɲ��֣���ȷ��������أ��Ӷ���������ϵͳ���ܡ����еĿ��ӻ�����ϵͳ��������Ӧ�����Զ���ʻģ��ϵͳ�������ڸ�������������
���ݼ�����Ԥ�������ռ��Զ���ʻϵͳ���й����в����ĸ������ݣ�����������֪���ݡ�������Ϣ�����ƾ��ߵȣ��������ݽ�����ϴ��Ԥ�������Ա��ں���������
����ģ�����������ռ������ݣ���������ģ�͡���ģ���ܹ�����Ԥ��IJ������㷨����ϵͳ���ܽ�������������
���ӻ�������ƣ����ֱ�۵Ŀ��ӻ����棬��ͼ�κͶ�������ʽչʾ�������������Ӧ֧���û������������û�������Ҫѡ��ͬ������ά�Ⱥ�ʱ��Ρ�
��̬�����뷴����ʵ�ֶ�̬�������ܣ��ܹ�ʵʱ�����������������Զ�����ʽչʾ�����仯���ơ�ͬʱ��ϵͳӦ�ṩ�������ƣ������û���������仯��ԭ��
ϸ��̽��������������û�����̽���ض���������ܣ�ͨ������ʽ�Ľ��棬�û����Բ鿴��ϸ���������ݣ�������֪���ȡ��滮Ч�ʡ������ȶ��Եȡ�
����Ӧ�����Ż���������ϵͳӦ���ڲ�ͬ���Զ���ʻģ�ⰸ���У�ͨ��ʵ���������ݣ������Ż�����ģ�ͺͿ��ӻ����档
��ȫϢ��NASDAQ: HOLO�����Զ���ʻ�Ӿ�����ϵͳ������Ϊ��ǰ���Զ���ʻ�����о��ṩ��ǿ������֧�֣�ҲΪ��ҵ��δ����չ�춨�˼�ʵ�Ļ��������ż����IJ��Ͻ������г���������죬��ϵͳ������Ϊ�Զ���ʻ��������������Ҫ��ɲ��֡�








