

零次方机器人启动全模态数据采集中心,破解具身智能“卡脖子”难题
6月,国内首家实现专项场景超长序列多任务连贯操作机器人公司――零次方行业创新再突破,正式发布“全模态”具身数据全链路解决方案。方案旨在解决具身智能模型训练普遍存在的“数据模态缺失、数据采集流程繁琐、任务数据管理繁杂、模型训练推理部署门槛高”等难题,涵盖了:“全模态”数据采集设备、数据采集与管理平台、模型训练、模型推理方案。

解决方案图示
面向未来3-5年具身数据需求设计
技术路线上:当前具身智能模型的发展仍处于发展期,各研究团队的技术路线逐渐向更丰富的模态探索:
• 视觉-关节融合方案(如ACT、Diffusion Policy、DP3等):通过联合嵌入视觉信息与机器人本体感知,利用本体数据补偿视觉观测歧义性,提升动作泛化能力,但因缺乏力学反馈,在物理交互密集型任务中适应性不足。
• 语义-视觉-关节融合方案(如Pi0、GROOT等):引入语义信息(如语言指令/场景描述)增强环境与长序列任务的理解,结合视觉与关节状态实现多模态决策,提升复杂任务泛化性。
• 视觉-关节-力联合建模(如RDP等)引入力/触觉反馈构建物理表征,提升泛精密操作的鲁棒性;
• 更为齐全的模态架构正成为新趋势,通过跨模态对齐实现环境-物理-语义的协同推理。
在此背景下,零次方机器人数据采集中心的全模态数据架构具备双重核心优势:
1. 维度兼容性:全模态数据高维数据可自然降维生成任意子模态数据集(如剥离力触觉获得纯视觉-关节数据),兼容现存所有算法范式的训练需求;
2. 价值持续性:预设传感器冗余通道,集成工具标注对齐多模态数据流,为正在演进的VLA、跨模态对齐、物理因果推理、世界模型等等未来3-5年可能涌现的具身模型提供燃料。
这种前瞻性设计能兼容当下技术生态、支撑长期算法进化的“高维数据基座”。此外,零次方的“全模态”数据采集人形机器人 ZERITH-H1,完美兼顾零次方机器人数据采集中心的全模态数据架构设计,实现全模态数据采集与落地。
“全模态”数采人形机器人 ZERITH-H1
ZERITH-H1采用高度拟人化的上肢结构设计,其关节自由度布局严格参照人体工学,并显著扩展了关节活动范围。特别设计的升降柱式构造有效抬升机身,大幅消除腿部空间占用,最终实现超越成年男性的灵活操作空间。

高维度“全模态”传感器设计:为应对具身智能模型训练普遍存在的“数据模态缺失”问题,零次方机器人在Zerith-H1设计阶段即整合了各种模态的传感器,可实现对二维视觉信息、三维空间信息、关节信息、力触觉信息、声音信息的“完整”模态信息采集。

集成触觉感知,抓取豆腐等易碎物
特别的是,针对于力触觉感知部分,ZERITH-H1搭载了触觉夹爪,集成了高分辨率视触觉传感器,实现对抓取力触觉的精准感知。零次方在视触觉传感器方面技术积累深厚,源于清华AI&Robot实验室。实验室曾提出过超越人类触觉感知水平的超光谱视触觉传感方案,相关视触觉成果多次获ICRA、IROS Best Paper Finalists、多次在T-RO、Soft Robotics、T-MECH上发表相关研究。
低延迟、高动态响应的遥操系统:为了进一步满足实时同步操作的需求,零次方将机器人与采集者通讯延迟无限推进至零延迟,实现“孪生式”映射同步感知;同时整体设备连续运行时间超过4小时,满足长时间不间断的数据采集需求。
VR遥操演示
VR APP:快速构建物理世界与虚拟世界交互渠道:基于主流vr设备自研ZERITH-VR APP,实现遥操作设备与机器人本体、具身数据管理平台超低数据传输延时。同时通过“一键式”设备连接、“引导式”数据采集工作流,帮助用户快速掌握复杂任务数据采集能力,确保数据收集质量、提升数据采集效率。

ZERITH-VR APP界面
具身数据采集管理平台:将采集的多元化数据,转为即用型训练燃料
针对数据采集任务多样、采集流程繁杂、数据管理及可视化等需求,零次方机器人数据采集中心的自研具身数据管理平台用于数据全流程管理,依托自身开发模型的经历,通过数万次的数据采集与测试,不断测试数据管理平台易用性,现正式对外推出具有:对具身任务数据分类、清洗、标注、检索等模块化高易用性的具身数据采集管理平台。

集成高效训练与部署工具链:让训练与场景落地更迅捷、更简易化。
同时,为让用户可快速、便捷式将数据集应用于模型训练,零次方机器人数据采集中心的数据平台设计兼容主流开源算法框架的标准化接口(如ACT、Diffusion Policy、DP3等);数据接口兼容对基座模型(Pi0、GROOT、ZERITH-V0等)的后训练(LORA、Full tuning、RL等),提供符合许可证要求的快速训练接入能力。
在模型训练过程,零次方机器人数据采集中心深度集成AI训练工具Swanlab,实现对模型训练的全过程记录、实时监控、数据可视化与批量实验分析,帮助用户科学调参、管理历史训练实验数据,高效迭代自己的具身智能模型。
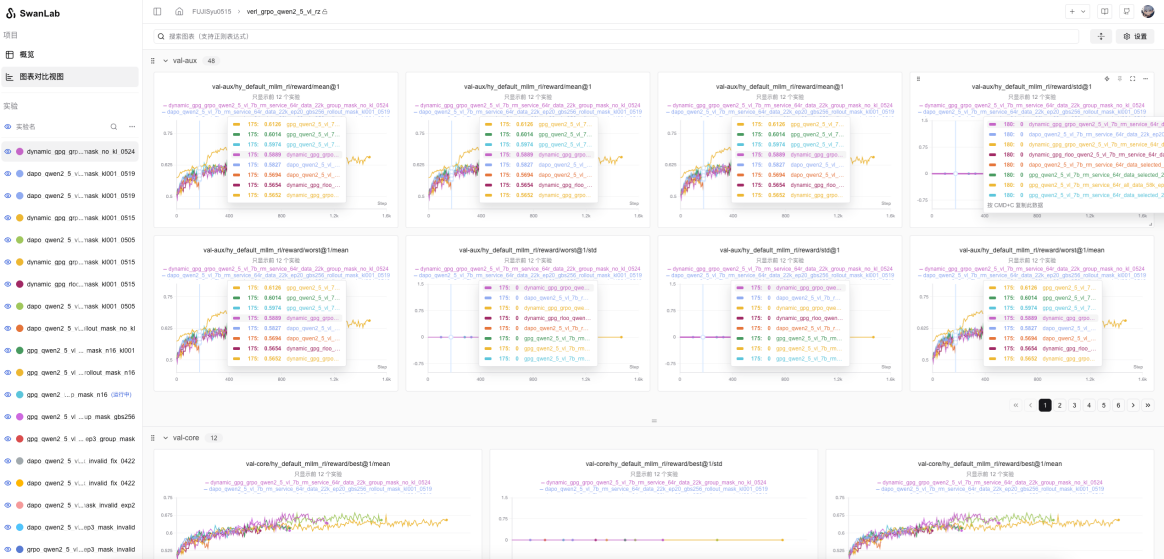
训练过程可视化监控与记录
在模型推理上,机器人最高可选500TOPS算力主机,集成易用部署的框架,优化推理效果,实现丝滑动作执行,真实可见的在场景中的落地效果。

1.本网刊载内容,凡注明来源为“飞象网”和“飞象原创”皆属飞象网版权所有,未经允许禁止转载、摘编及镜像,违者必究。对于经过授权可以转载,请必须保持转载文章、图像、音视频的完整性,并完整标注作者信息和飞象网来源。
2.凡注明“来源:XXXX”的作品,均转载自其它媒体,在于传播更多行业信息,并不代表本网赞同其观点和对其真实性负责。
3.如因作品内容、版权和其它问题,请在相关作品刊发之日起30日内与本网联系,我们将第一时间予以处理。
本站联系电话为86-010-87765777,邮件后缀为cctime.com,冒充本站员工以任何其他联系方式,进行的“内容核实”、“商务联系”等行为,均不能代表本站。本站拥有对此声明的最终解释权。
5G-A赋能机器人火炬接力:中国移动以技术革新点亮全运科技盛宴
2025年11月,第十五届全国运动会将在粤港澳三地盛大启幕。这场赛事不仅是体育健儿的竞技场,更是前沿科技落地应用的“试验田”。其中,11月2日的机器人火炬接力作为本次全运会的核心创新亮点..[详细]
轻薄机型出师未捷身先死,长使业绩泪满襟
当iPhone Air宣布上市当天,随着各路评测内容解禁,一个显眼的标题也随之出现,那就是“注定停产”。轻薄机型的出现一方面让人们看到厂商正在挖掘全新市场空间,另一方面也勾起了小尺寸机型..[详细]
智能未来:宇宙为你闪烁
未来十年,你家的电表可能再也不用换电池,自动驾驶汽车能"看到"几公里外的路况,甚至海洋深处的传感器都能实时传回数据。这些不是科幻,而是刚刚在无锡物博会上发布的《2025全球..[详细]
智能IP广域网成为筑牢智算产业发展根基的关键一环
随着国家加速推动智算产业高质量发展,网络支撑能力已成为产业进阶的核心抓手,而作为关键基础设施的智能IP广域网,正凭借其在算力调度、数据传输中的核心作用,成为筑牢智算产业发展根基的..[详细]
大中华区市场失守 苹果寄望AI驱动未来增长
苹果公司公布的2025 财年第四季度财报呈现“冰火两重天”态势:全球营收1024.66亿美元同比增长 8%,净利润274.66亿美元同比激增86.4%,毛利率攀升至 47.18%。但作为第三大市场的大中华区却成..[详细]









