
�ڵ���Ƽ����ٷ�չ��ʱ�����߾��Ȳ����������ڶ������ж�����������Ҫ�����á�ȫϢ������HOTs��ƾ����ǽӴ��߾��Ȳ����Ķ������ƣ���С����Сλ�ƵĶ������������еõ���Խ��Խ�㷺��Ӧ�á�Ȼ��������ȫϢ�Ż��㷨������౨����������������Щ�㷨��ȫϢ�Ⲷ�����ܵ�ϵͳ�о�ȴ����ѷ�����ȫϢ��NASDAQ:HOLO�������о������ֲ�ͬȫϢ�㷨�� HOTs ���ܲ���������ı��֣�Ϊ�ƶ���һ����ķ�չ�����˼�ʵ��һ����
��ȫϢ��˾ͨ����ƺ���HOT�豸���������ֲ�ͬ��ȫϢͼ�㷨������ȫ��ıȽ��о����ɹ���˶���Щ�㷨������ȫϢ�Ⲷ������ϵͳ�о��Ŀհף�
��һ���ⳡǿ�ȷֲ�����
��ȫϢͨ����ȷ�����ͷ��������㷨���ɵĶ���������еĹⳡǿ�ȷֲ���Ϊ�ⳡ�����������ṩ�������ı��������ͬ��Ӧ�ó����Թⳡǿ�ȷֲ��в�ͬ��Ҫ������������ҽѧ�������ϸ������ʱ����Ҫ�������ȶ��Ĺⳡ��ȷ��ϸ���İ�ȫ�;�ȷ�ٿء���ȫϢ���о���ȷ�˸����㷨�ڹⳡǿ�ȷֲ�����ı��֣�Ϊ����ʵ������ѡ����ʵ��㷨�ṩ�����ݡ�
����������ն�����
����ն��Ǻ���ȫϢ���������ȶ��ԵĹؼ�ָ�ꡣ��ȫϢ������նȵIJ����ͱȽϣ�����Ϊ������ͬ�㷨�������ṩ����Ҫ��������Ϊ�Ż�ȫϢ����ϵͳ������ṩ��ָ�������磬�ڶ�С���������о�ȷ�ٿ�ʱ����Ҫ���и߸ն�������㷨���ֿ������ţ�ȷ��������λ�þ��ȡ�
������������
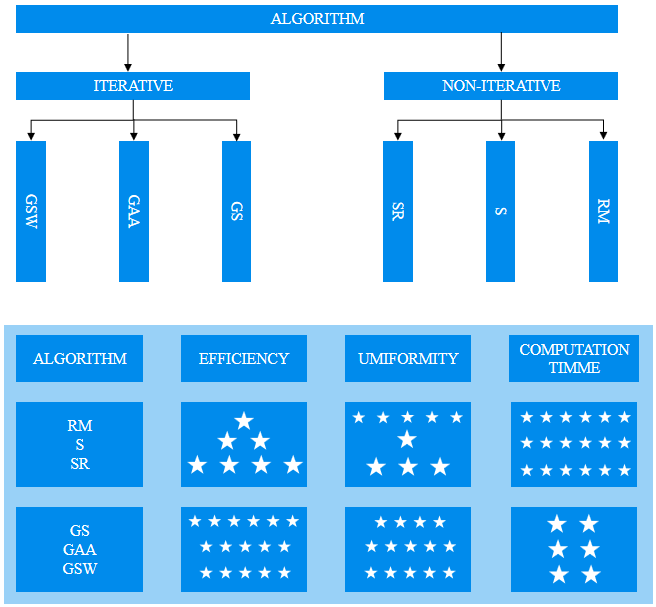
Ч�����������˼���ʱ������ɹ�����������������档��ȫϢͨ���ۺϿ������������أ�Ϊ����ȫϢ�㷨��ʵ��Ӧ�ü�ֵ�ṩ��ȫ����ӽǡ���ʵ��Ӧ���У����ٵļ���ʱ��������Ĺ���������������������Ҫ�ġ���ȫϢ���о��ɹ����������������㷨ѡ���ϵͳ�Ż�ʱ���ҵ�Ч�ʵ����ƽ��㡣
���ģ�����ʱ������
����ʱ����Ӱ��ȫϢ�㷨ʵ��Ӧ�ÿ����Ե���Ҫ����֮һ������һЩʵʱ��Ҫ��ϸߵ�Ӧ�ó������綯̬���ٺͲٿ�С���壬�㷨�ļ����ٶȱ����㹻�졣��ȫϢ�������㷨����ʱ��ıȽϣ�Ϊ�ڲ�ͬӦ�ó�����ѡ����ʵ��㷨�ṩ�˹ؼ���Ϣ��ͬʱ��ҲΪ�㷨�Ľ�һ���Ż��ṩ��Ŀ��ͷ���
���壩�ռ�ֱ�������
��ȫϢ�Ⲷ��ϵͳ�У��ռ�ֱ����Ǿ����ܷ�ȷ�ٿ�С����Ĺؼ����ء���ȫϢ��˾ͨ��ʵ����֤������ȫϢͼ�㷨�ڲ�ͬ�ռ�ֱ����µı��֡��о����֣�ijЩ�㷨�ڸ߷ֱ����������ܹ����ɸ���ϸ�Ĺ����壬�������㷨���ڵͷֱ����±��ָ��ѡ���һ���ֶ���ѡ���ʺ��ض�Ӧ�ó������㷨������Ҫ���壬�����ڸ߾������������߿ռ�ֱ��ʵ��㷨�����ܻ�ӭ��
��������Ŀ�겶����������
��ʵ��Ӧ���У�ȫϢ�Ⲷ��ϵͳ������Ҫͬʱ�ٿض��Ŀ�ꡣ��ȫϢ�������㷨�ڶ�Ŀ�겶��������������������������㷨���ɶ��������������Լ��ڶ�Ŀ��ٿ�ʱ���ȶ��Ժ�ȷ�ԡ��о����������ijЩ�㷨�ڴ�������Ŀ��ʱ���ֳ�ɫ���������㷨���ڴ�������Ŀ��ʱ��Ϊ��Ч����һ����ΪȫϢ�Ⲷ��ϵͳ�ڶ�Ŀ��ٿ�Ӧ���е��Ż��ṩ����Ҫ�ο���
��ȫϢ��NASDAQ:HOLO��ͨ��������ȫϢͼ�㷨�� HOT �����ϵ������о���Ƚϣ����������۲���ΪȫϢ��������������������ϵ�춨�˼�ʵ������������ϵͳ���о����Ⱥӣ�����ʵ��Ӧ����Ϊ��ͬ����������ṩ�˾����㷨ѡ�����ݺ��Ż�����








